
Hi again…
This time at robotics I made a simple 1 sensor line follower. I found it pretty complicated to get the robot to follow a straight line, that was partly because it wouldn’t start exactly on the black line sometimes it would start on white and thats when it wouldn’t work at all.
The code worked better when the robot was making turns but not so much for when it was going straight.
This was the code I finished, even though it didn’t completely work…
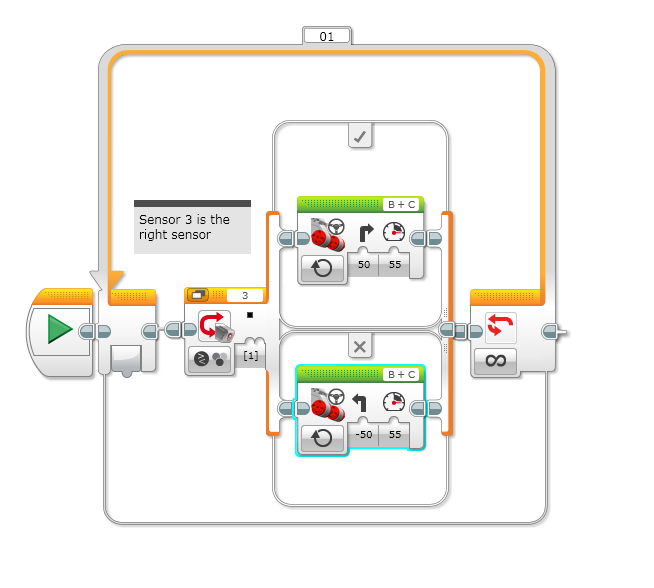
Pretty much all the code tells the robot is, if you see black turn right if you see white turn left. This makes the robot wiggle and follow the line at the same time. The reason why it wiggles is because I only used one sensor, if I had used 2 then it would have wiggled way less.
Well good bye, I’ll write again next week…