The last few weeks have been a bit of a mish mash with different students away at different events, school holidays and pets day preparation. It was nice to have everyone back together again today!
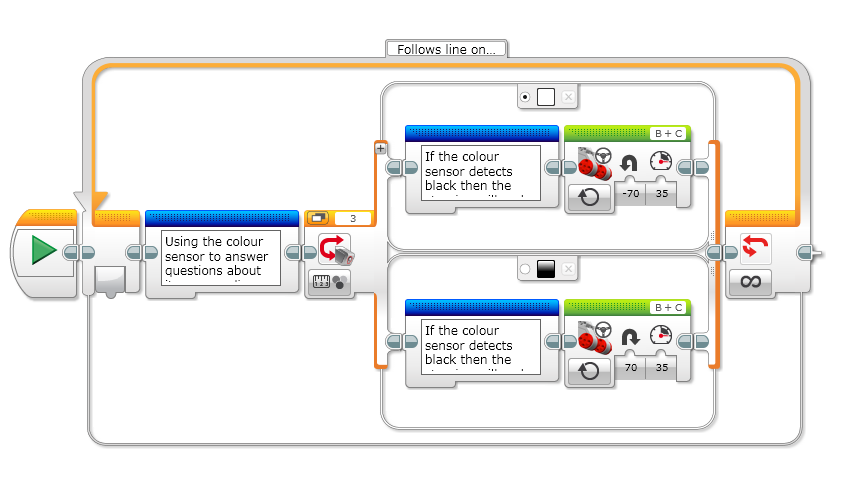
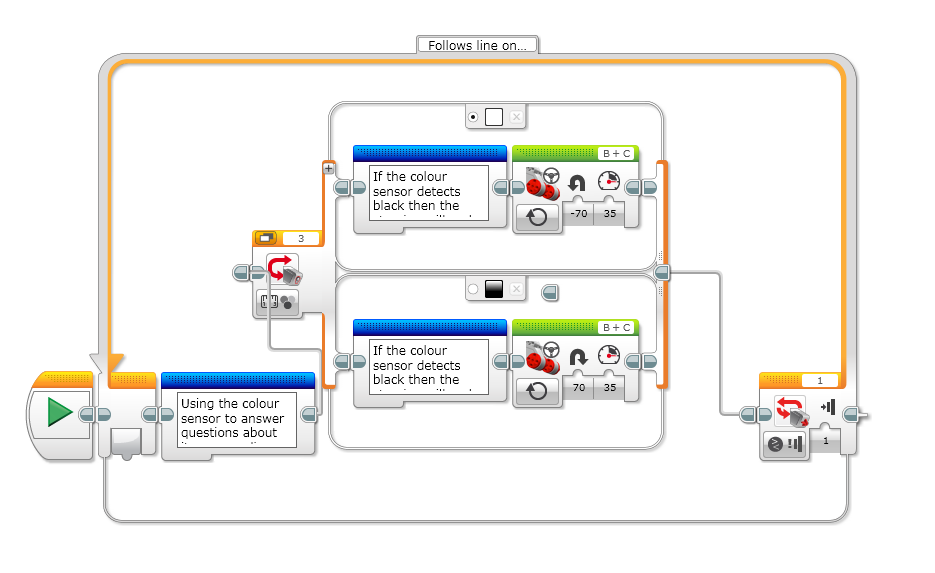
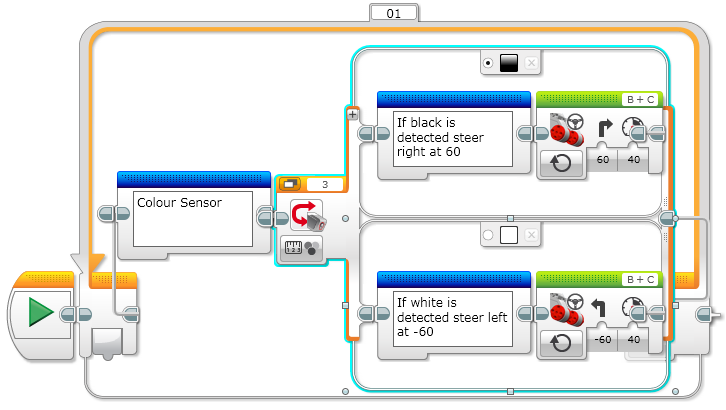
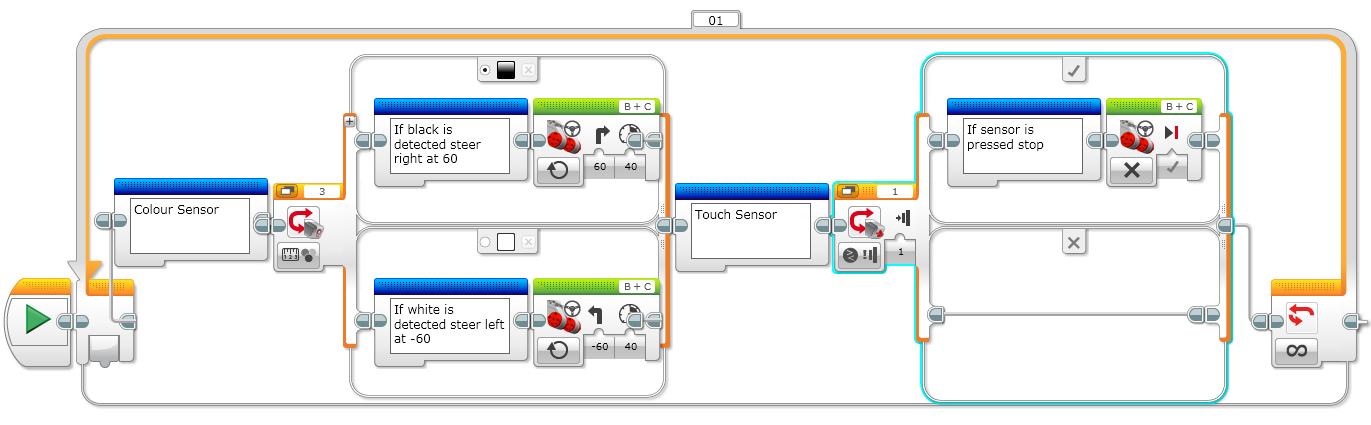
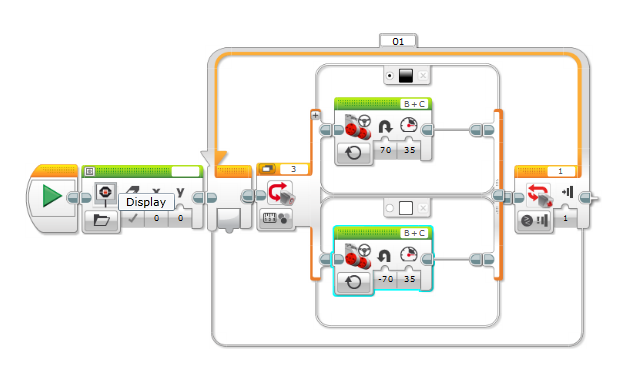
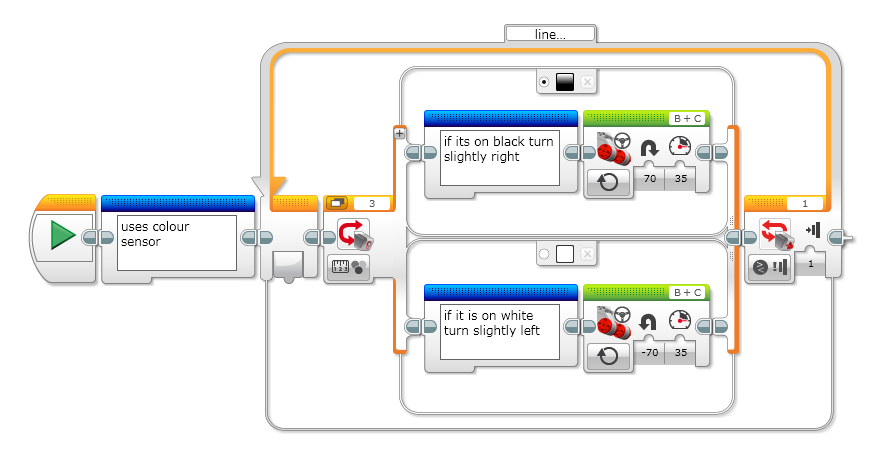
The children are starting to become really familiar with the robot and how the EV3 language works so I felt it was a great time to start working towards our ultimate goal – the New Zealand RoboCup Junior rescue competition. The first part of the rescue challenge is to autonomously follow a black line. The video, below, shows what they achieved today. You’ll notice that the robot wobbles quite a bit! This is normal for a basic algorithm but it can be dramatically improved with maths and much more complexity… perhaps something to come back and look at once the complete rescue challenge is achieved!
You’ll see, in the posts below this one, that they’ve all done a great job describing what they did today so I won’t write any more 🙂
The Challenge:
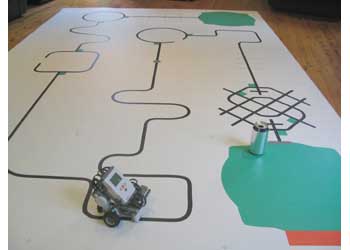
A terrible earthquake has hit the city and caused a large chemical storage unit to rupture spilling thousands of litres of toxic chemicals in the centre of the city. There is a person trapped on a sinking water tank in the middle of the chemical spill. Rescue crews are having trouble entering the city with the amount of rubble around and rescue from the air has also been ruled out due to the noxious gases rising around the city.
It has been decided that the best form of rescue is the deployment of an autonomous robot that can navigate to the scene and rescue the stranded person by pushing or dragging the water tank out of the chemical spill. The water tank must be upright throughout the rescue.