
🙂 This week at coding we made a simple line follower that (surprise, surprise) followed a line. It wasn’t at all simple to make it though.
We had two challenges. Our first was to make a line follower that successfully followed lines using white and black. Our second was to make our robot stop running the program if the touch sensor was pressed.
At first, I tried to use the Reflected Light Intensity block to see if the light that was on the line was more or less than 50. This did not work because of the ambient light making the numbers mixed up. My idea was to make the robot follow the edge of the line, but it was too complicated for me and I didn’t understand it. We will do that sort of code in future weeks.
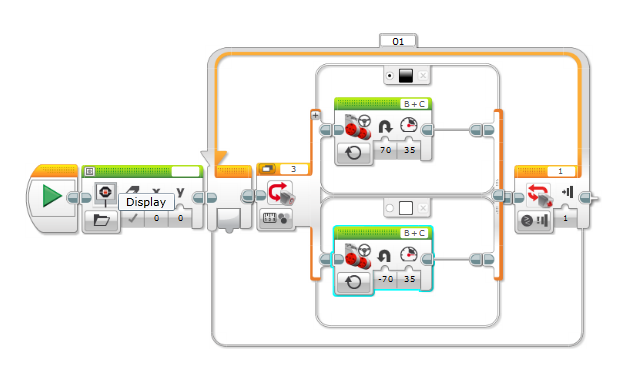
I then decided to use the Compare Colour mode. This detects what colour the colour sensor is seeing, then reports it to the code. If the sensor detects black then the robot turns right 35 degrees, and on white it turns left 35 degrees.
This session took a lot of trial and error and a lot of mistakes. In the end I learned a lot about the language and how it works. My final result is down below. 😉
WORD OF THE DAY: Hunt-and-peck. Using only one or two fingers to type on a computer keyboard.