
Last week I wasn’t at coding so I missed out on the 2-sensor line-following session so I caught up on that today. We joined up our line-following code with the ‘find the can’ code from 2 weeks ago to make a piece of code that can do the whole course. This course will not be the course we do in the Robocup Junior next year, instead, we will be doing the Senior course in which you have to reach up to a platform to get the can and there is a harder line following course. Here is a picture of my code:
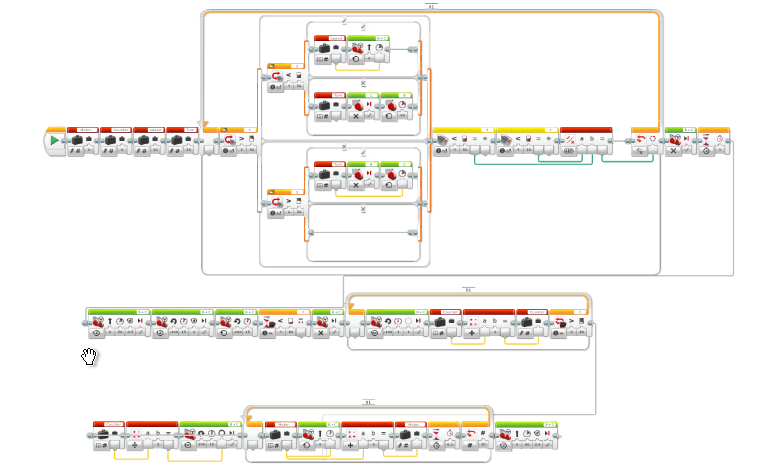
Some problems I had today were stopping the infinite loop and getting the robot to move again once it had got out of the loop. I solved this by changing the loop type to a colour sensor loop so it exited out of the loop when it detected grey.