
This week one of our main focuses was to add the Ultrasonic sensor to the robot. In case you don’t remember what the Ultrasonic sensor does, it can measure the distance from the robot to an object. It does that by firing high-frequency sound waves (hence the name ultrasonic) out of a T (transmitter) module that bounce off solid objects such as walls, or in our case, the can. The sound waves emitted from the T module then bounce back to the R (receiver) module. The time delay between firing and receiving is then calculated by the computer by an algorithm that converts the time delay into the distance. We use the Ultrasonic sensor for rescuing the can at the end of the line following course in the RoboCup Junior.
*picture of updated robot with ultrasonic sensor plz, Richard?*
Next week I am going to copy my old Can-finder program off this blog and put it back into my file.
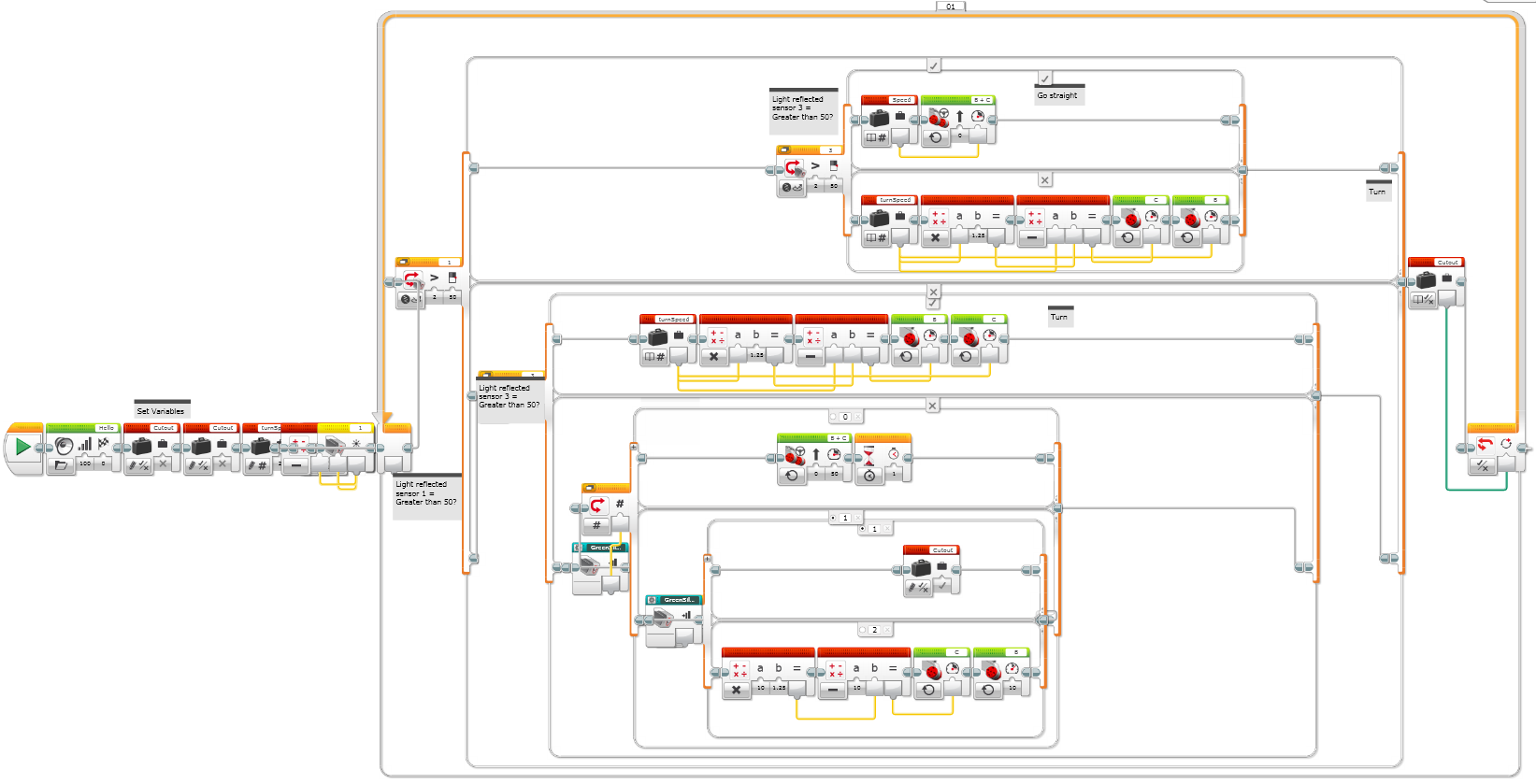
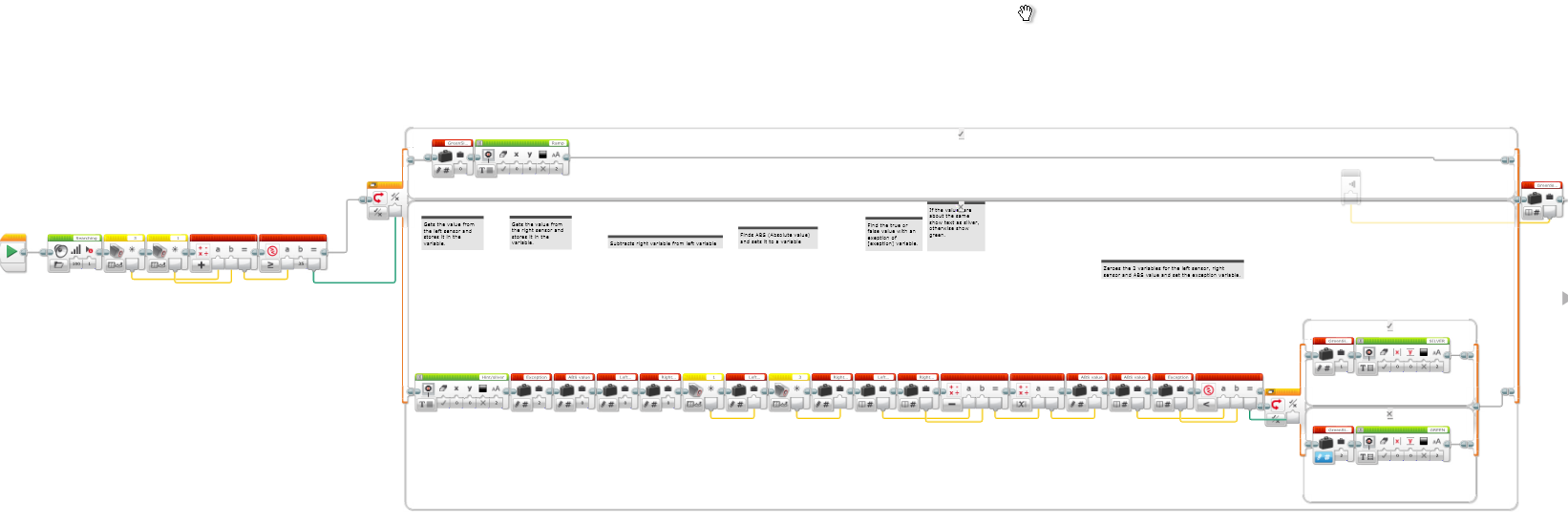
This week I managed to make a loop cutout for when the robot finds silver. This is mainly successful, but on one of the tries the robot found both sensors with equal values when it came across a hint instead of on silver. This would result in the loop cutting out early and causing an embarrassment in the competition. To stop this happening, I could insert a [wait] block into the hintFinder myBlock and make sure the robot actually is on silver before the loop cuts out.
Next week Richard plans to have a full-day session so we can make a program out of our best codes and try to fix the existing errors and any new bugs that pop up.
Useless fact of the day: “Stewardesses” is the longest word typed with only the left hand on a conventional QWERTY keyboard.