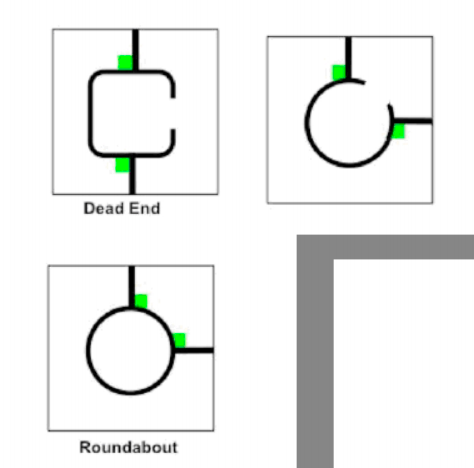
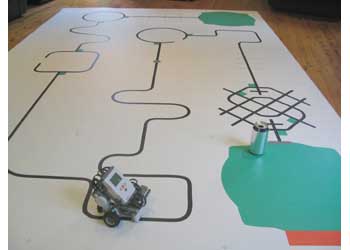
Hi guys, today I worked on my hint finder (again). This time I got around some tight corners which looks like very sharp corners.
The turns were in the junior and also maybe the senior compition. The problem we had is we had to get around the hints and the tight corners together.
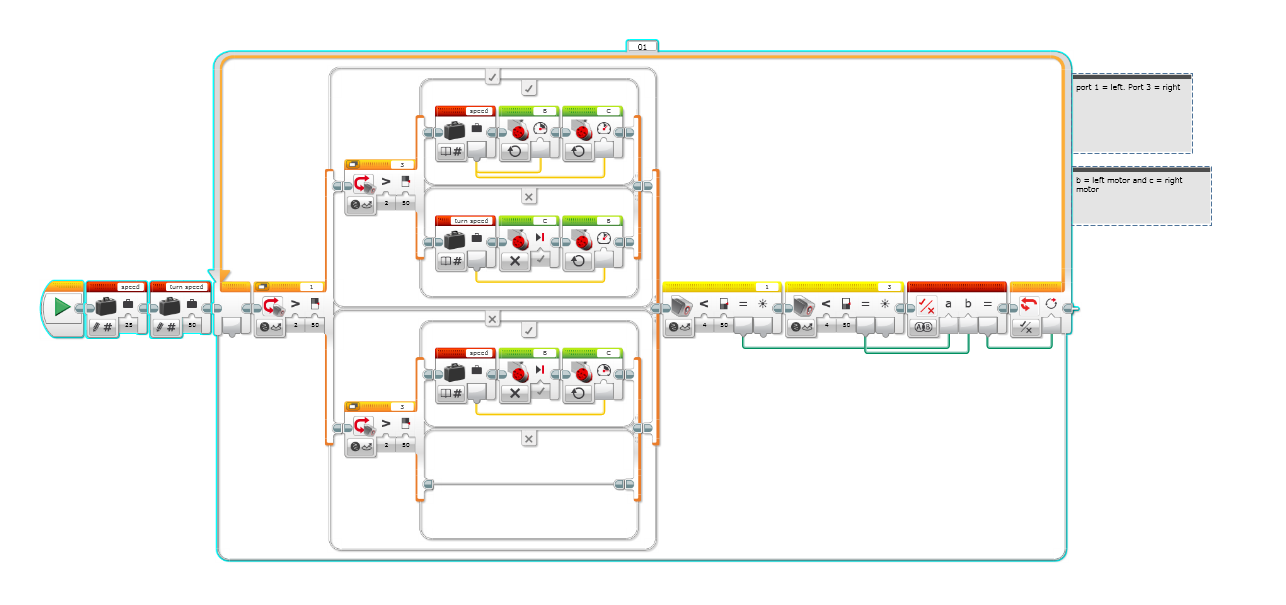
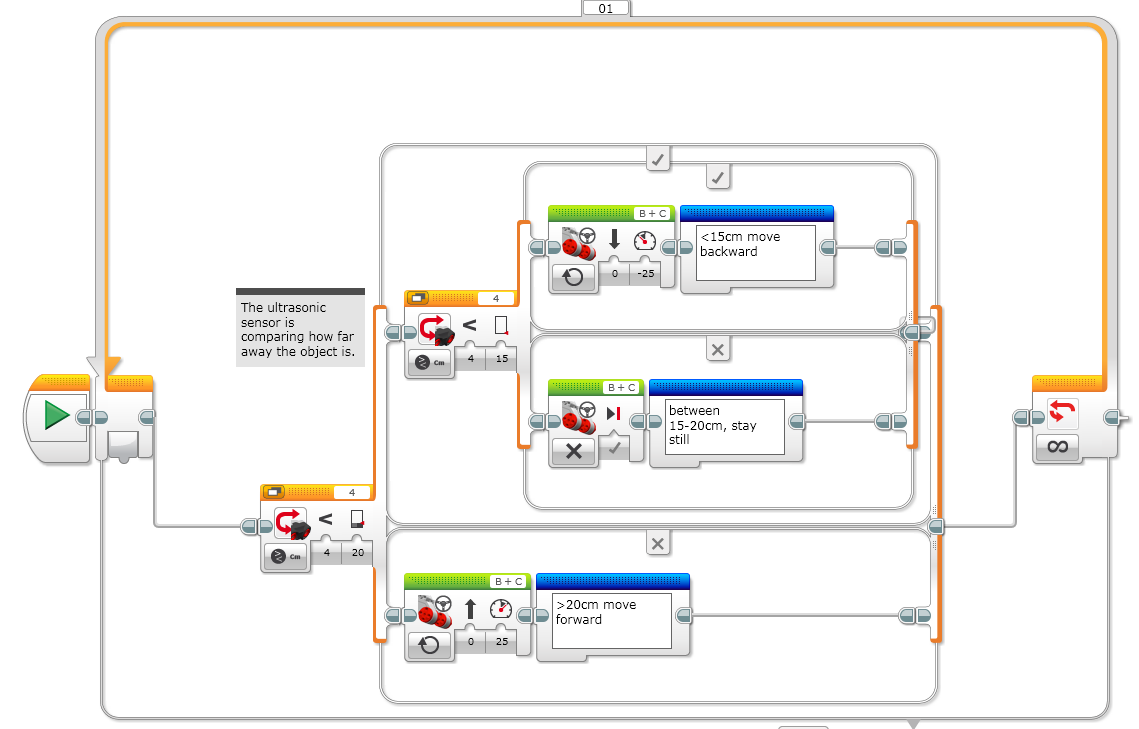
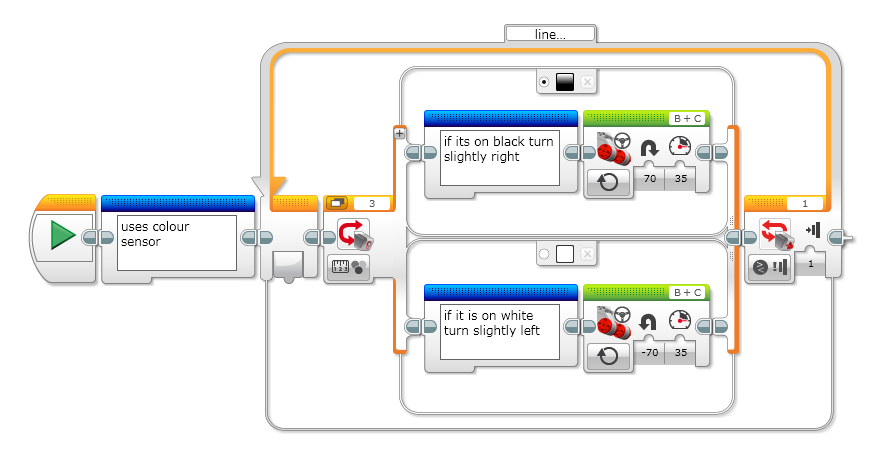
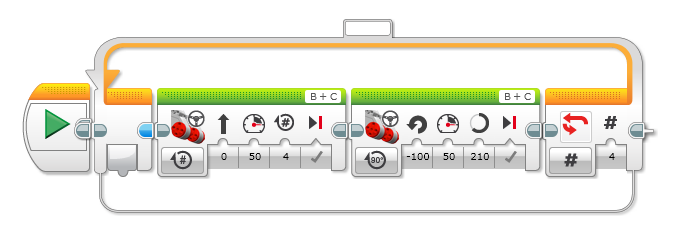
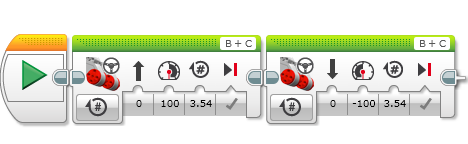
We tried to do them both with the previous code but it didn’t work. I thought that if I moved the sensors closer a bit and make the turn speed more aggressive, it might work. It sometimes went through the turns and sometimes did not. So that was the good news but the bad news is it gets up to one off the hints and goes off course and goes around in circles.
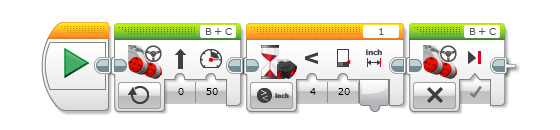
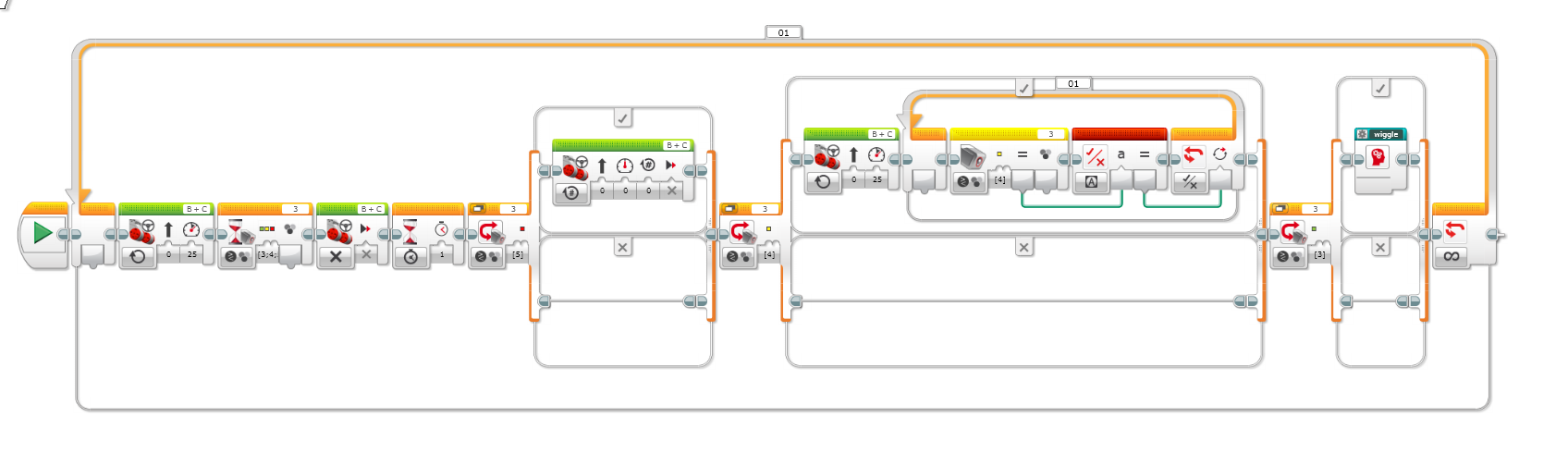
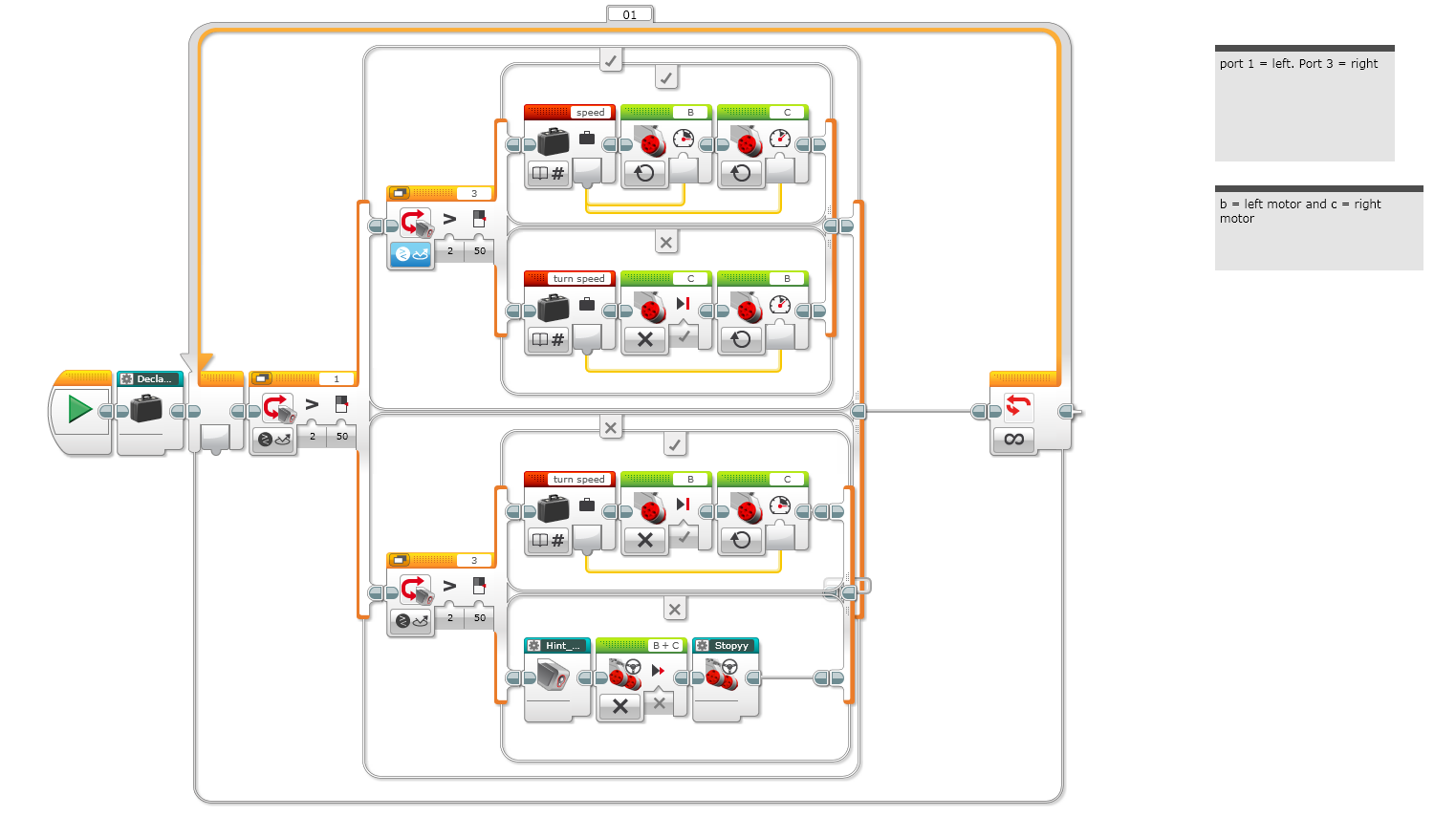
I decided to put a stop program block in the hint section but sadly, it doesn’t let you. This time I thought of making a my block because you could make one with a stop program in it and make the robot stop. (I called the block stoppy). I tried that but it also didn’t work! I thought if that didn’t work I could stop the motors and then stop the program. It didn’t work, again.
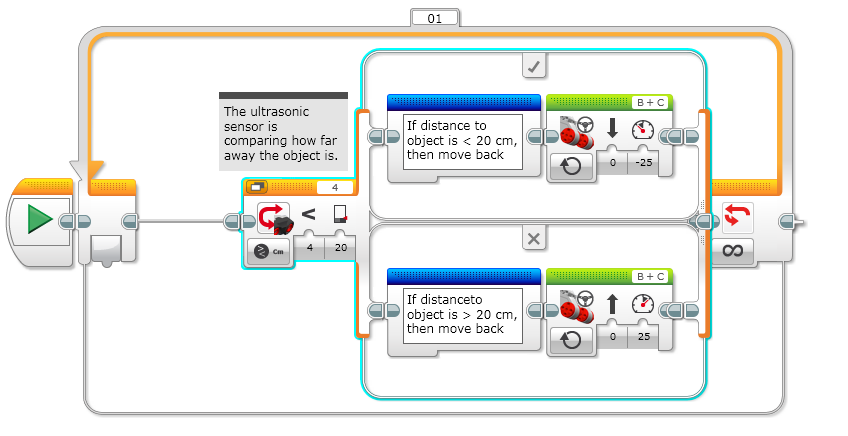
It was about time I headed back to class when dad came up with an idea. He saw that Sara and Tamsin where using one motor to go forward and one motor to go backwards and it was turning. When dad told that to me I thought that could possibly work to get around the sharp corners and complete the hints. But it might not work. You’ll just have to wait till next week I blog.
Before I go here is the word and the phrase of the day.
Perseverance: Persistence in doing something despite difficulty or delay in achieving success.
You have to be able to accept failure to get better. – LeBron James
Bye…